Threads线程
进程是最小资源分配单位
线程是最小执行单元
多线程服务框架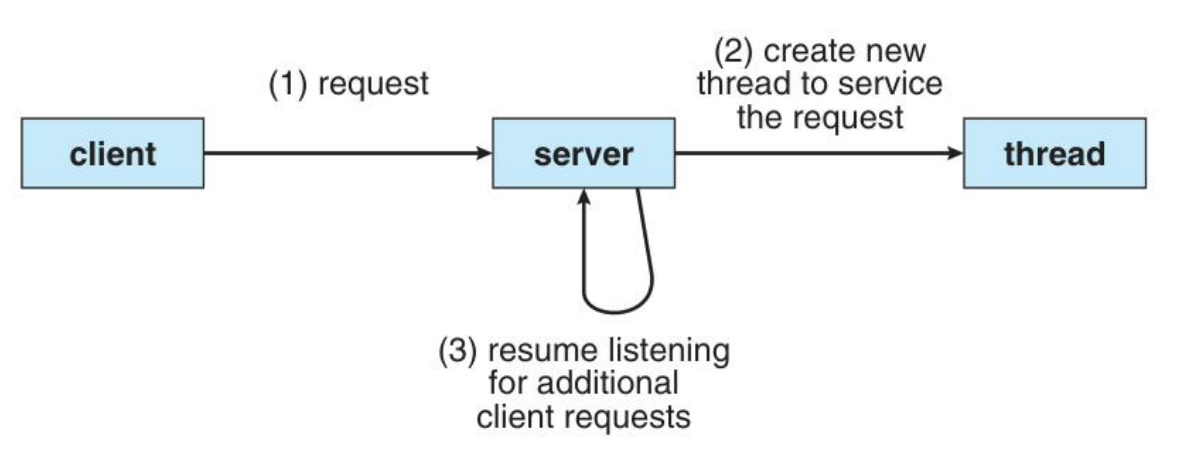
单线程与多线程进程:
线程共享进程中的数据,进程为每个线程创建栈和寄存器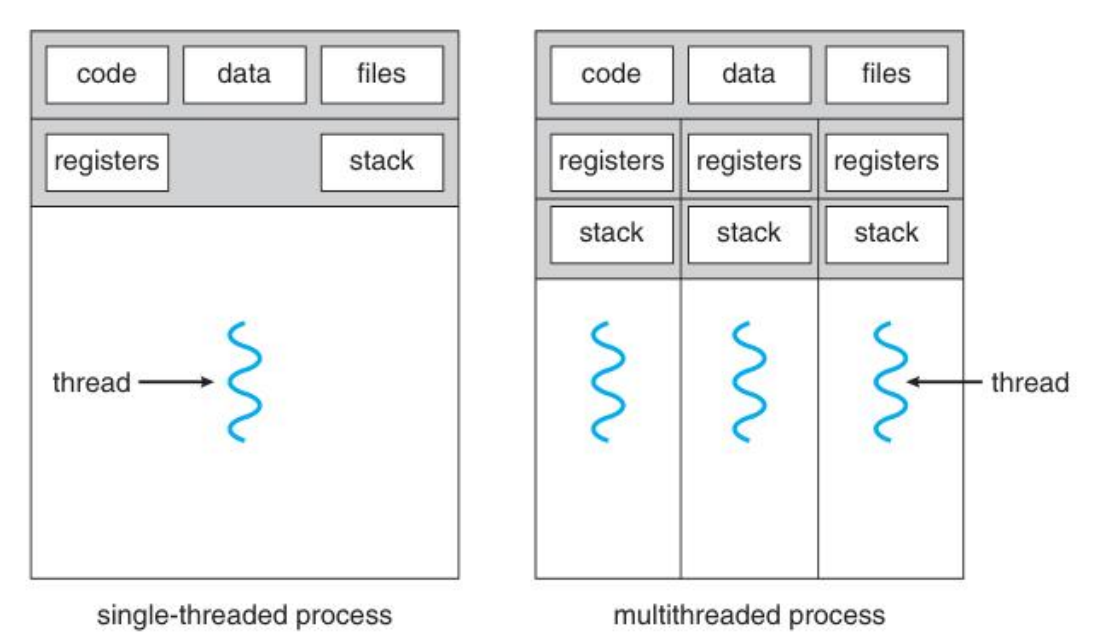
Concurrency并发:在单核系统上
Parallelism并行:在多核系统上
操作系统会为每个内核级线程建立相应的TCB(线程控制块),通过TCB对线程进行管理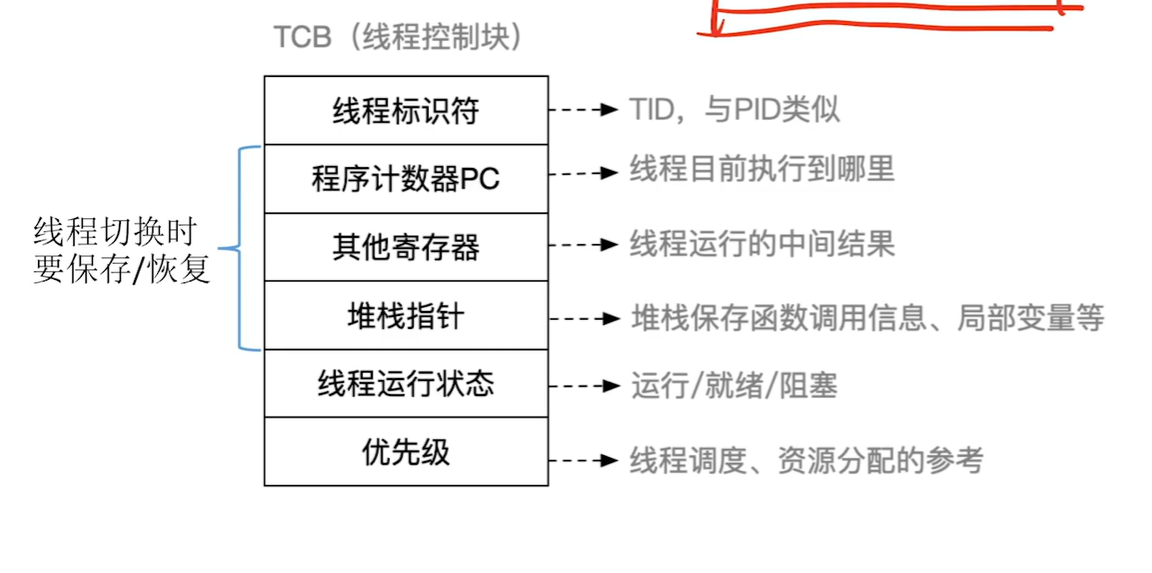
可将多个TCB组织成一张线程表
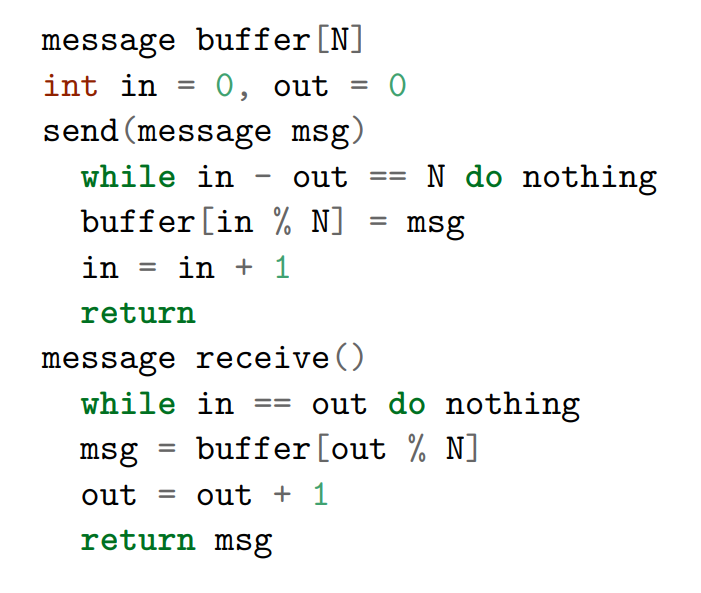
Race Conditions竞争条件
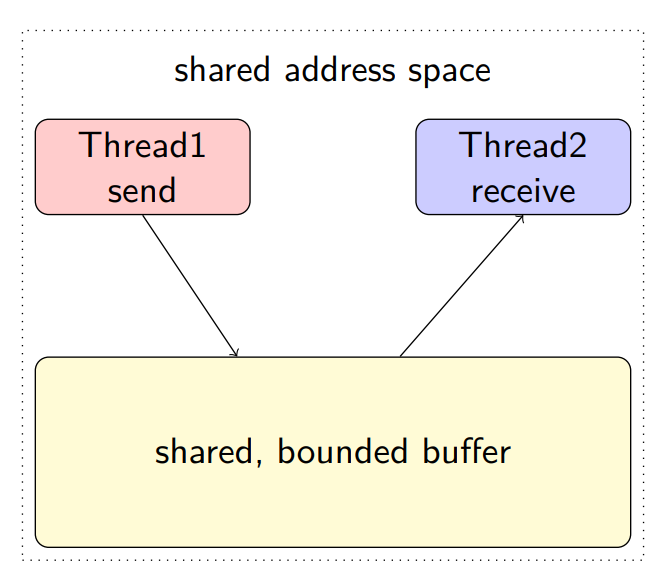
线程分为send和receive
- send:当buffer中有空间,可以写入
- receive:如果buffer中有message,返回message,创建线程
producer-consumer problem:
producer需要把message添加到buffer
consumer需要读取buffer中的message来创建线程
当有多个sender时:
A和B会产生竞争,导致in的值不正确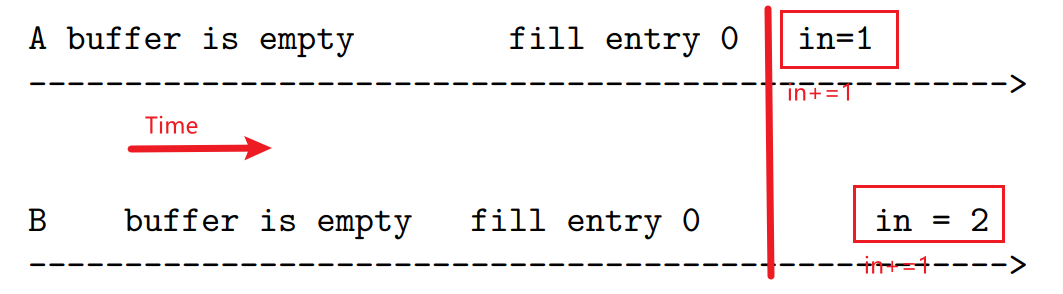
解决方法:acquire和release
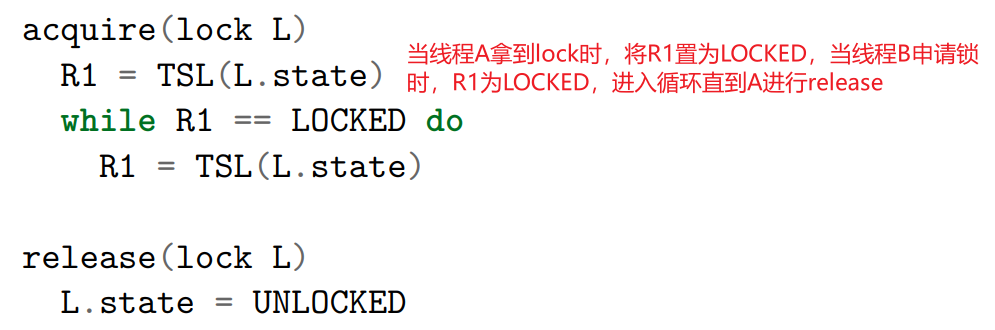
当一个线程进行时,需要先执行acquire申请一个lock,在执行期间持有,结束后释放
当一个线程持有lock时,其他线程acquire相同的lock会失败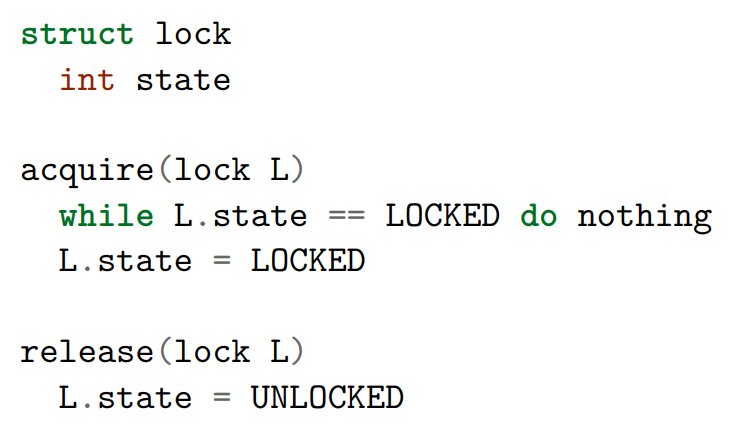
在两个线程共用一个lock时,也会出现竞争条件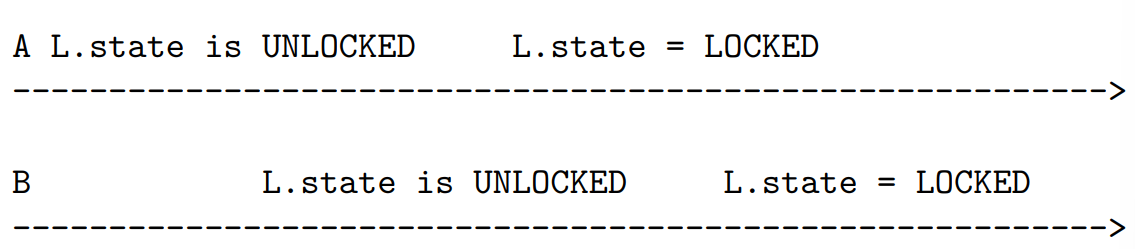
解决方法:Test and Set Lock(TSL)把参数变为真值,返回它的旧值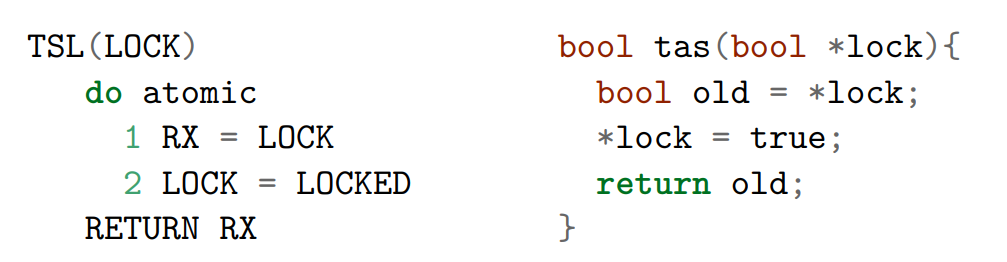
Compare-and-swap lock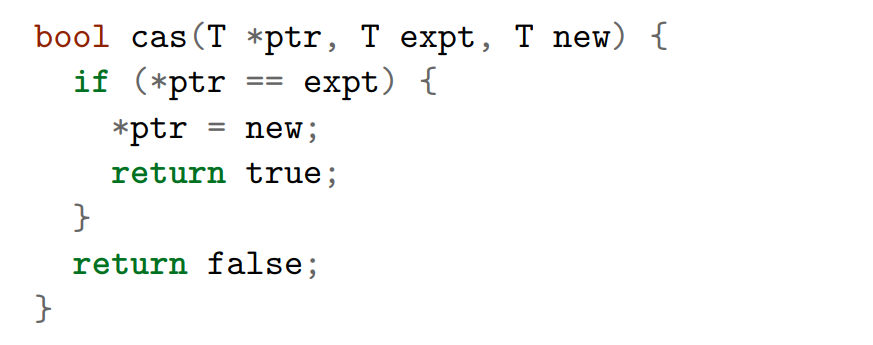
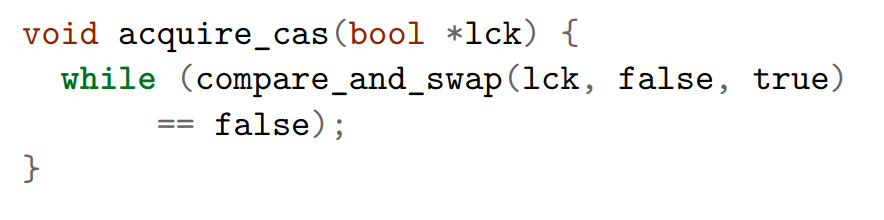
当线程A进行比较时,返回true,lck被置为true,线程A得到lock,此时线程B进行比较,返回false,进入循环,直到A进行release
进程同步
进程具有异步性的特征,各并发执行的进程以各自独立的、不可预知的速度向前推进
进程互斥
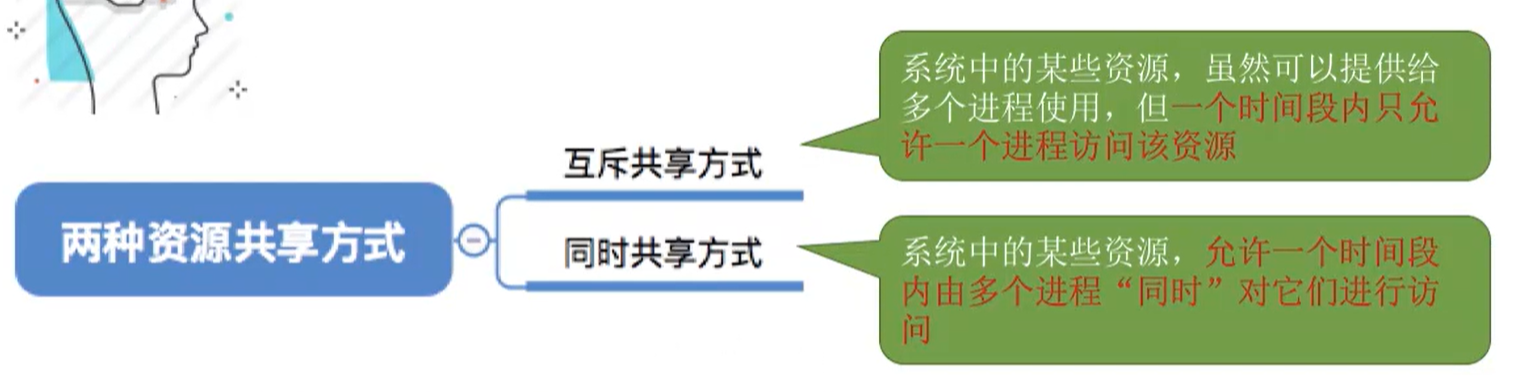
一个时间段内只允许一个进程使用的资源称为临界资源。对临界资源的访问,必须互斥地进行。
进程互斥指当一个进程访问某临界资源时,另一个想要访问该资源的进程必须等待。当前访问临界资源的进程访问结束,释放该资源后,另一个进程才能去访问临界资源。
对临界资源的互斥访问,分为四部分:
- 进入区:检查是否可进入临界区,可以则上锁
- 临界区:访问临界资源
- 退出区:解锁
- 剩余区:做其他处理
进程互斥的原则:
- 空闲让进
- 忙则等待
- 有限等待
- 让权等待
进程互斥的软件实现方式
单标志法
一个进程在访问完临界区后会把使用临界区的权限转交给另一个进程。也就是说每个进程进入临界区的权限只能被另一个进程赋予
举例: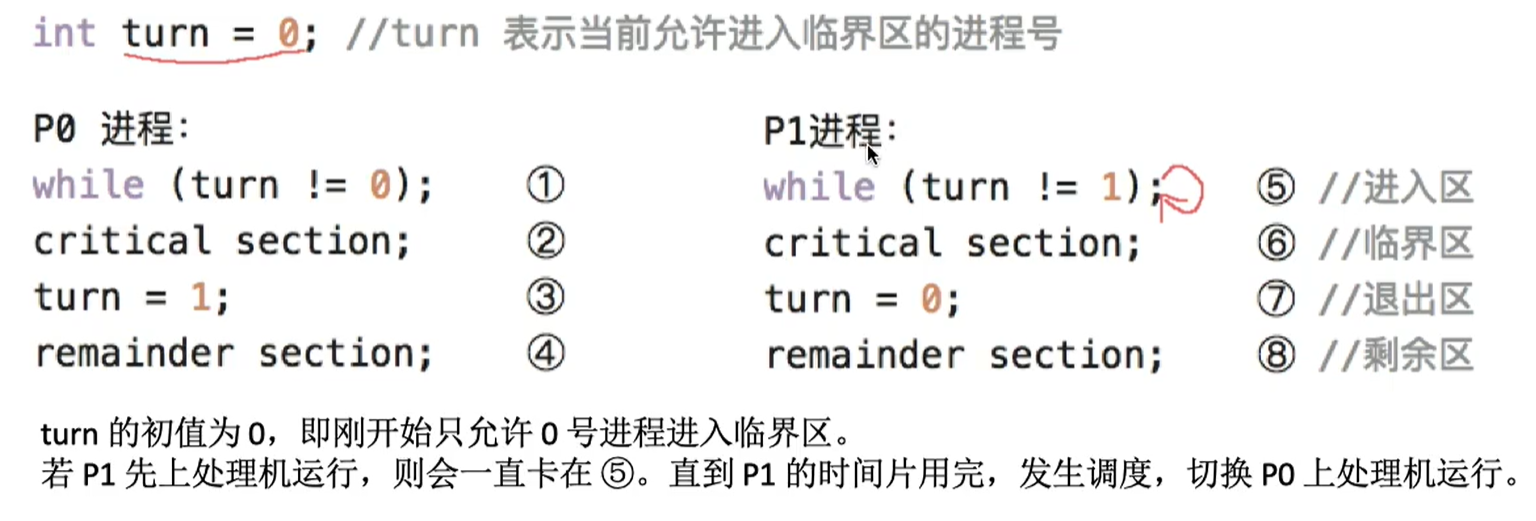
如果此时允许P0进入临界区,但P0一直不访问临界区,那么虽然此时临界区空闲,但是并不允许P1访问。
因此单标志法违背”空闲让进“原则
双标志先检查法
设置一个布尔型数组flag[],数组中各个元素用来标记各进程想进入临界区的意愿
先检查后上锁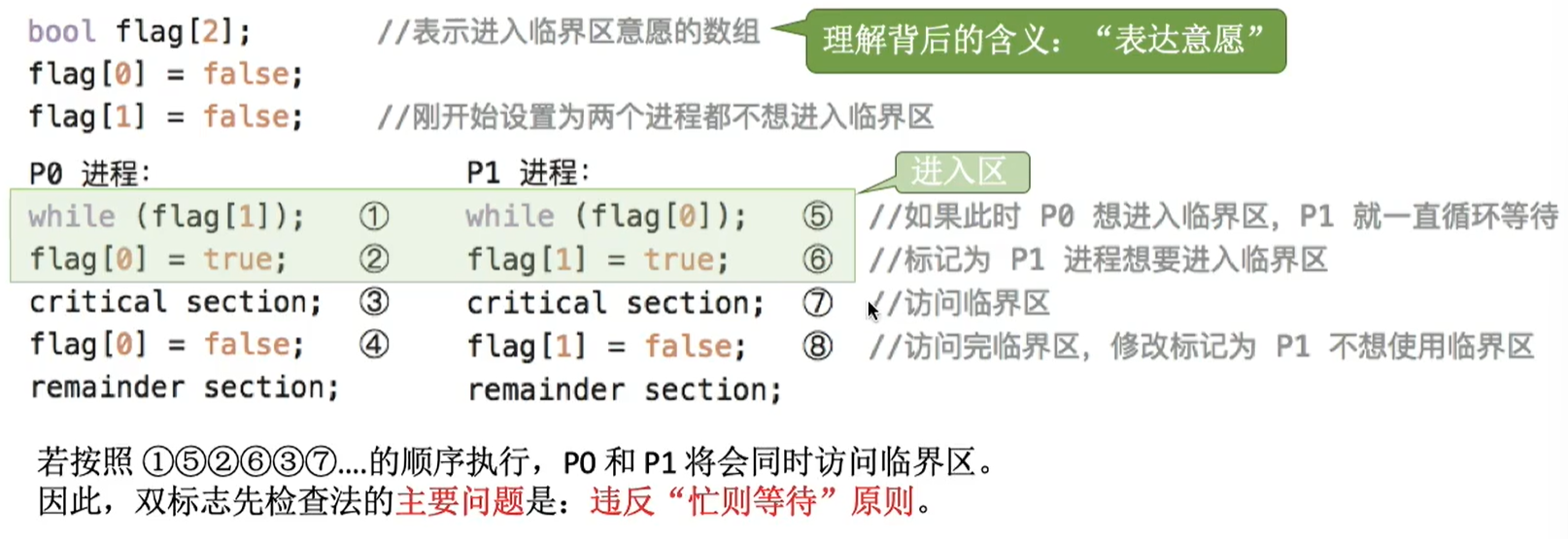
如果两个进程同时想要进入临界区,就会出现冲突。
因此双标志先检查法的问题是违背”忙则等待“原则
双标志后检查法
先上锁后检查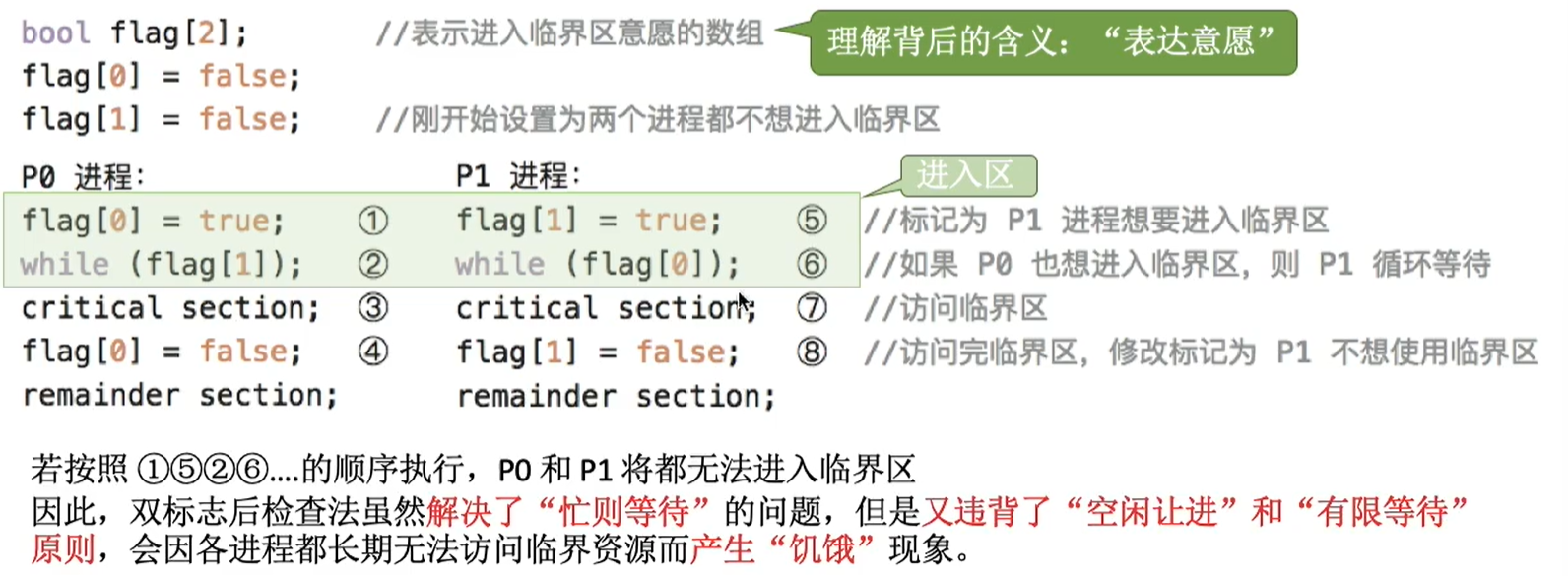
如果两个进程同时想要进入临界区,则它们都将无法进入临界区
违背了”空闲让进“和”有限等待“原则,会让进程产生饥饿现象
Peterson算法
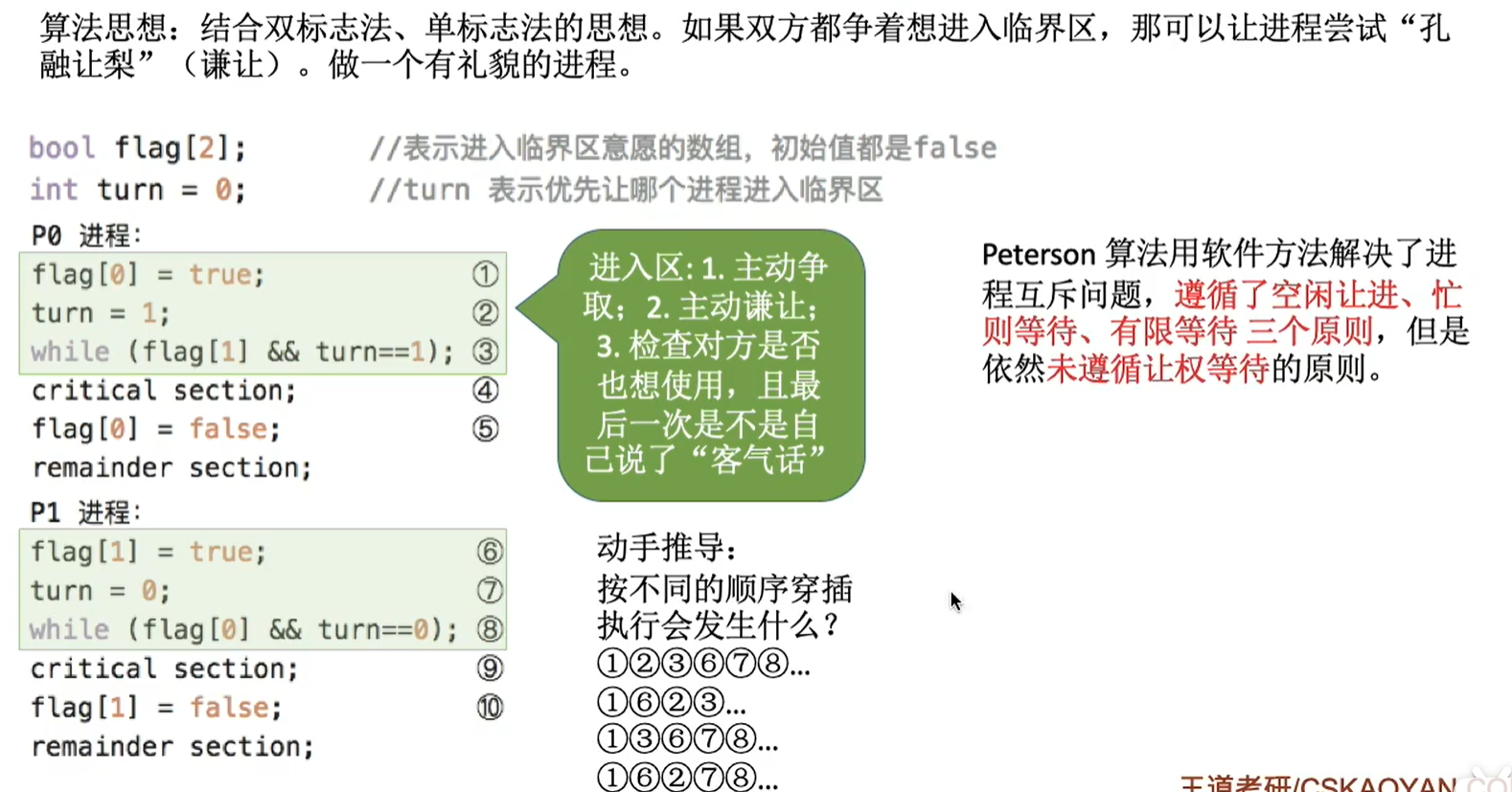
最后一个设置turn的进程会失去优先权
进程互斥的硬件实现方式
中断屏蔽方法
利用“开/关中断指令”实现,即某进程开始访问临界区到结束访问为止都不允许被中断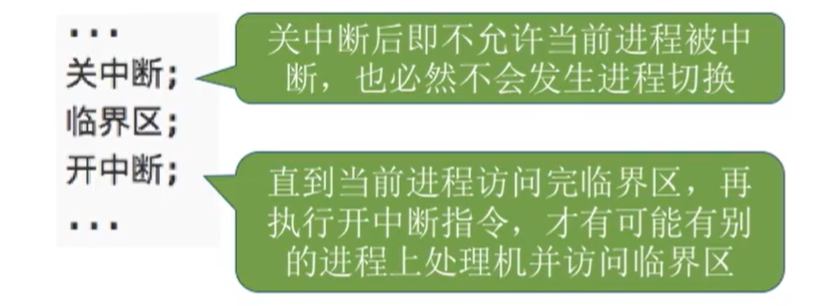
TestAndSet指令
简称TS指令或TSL指令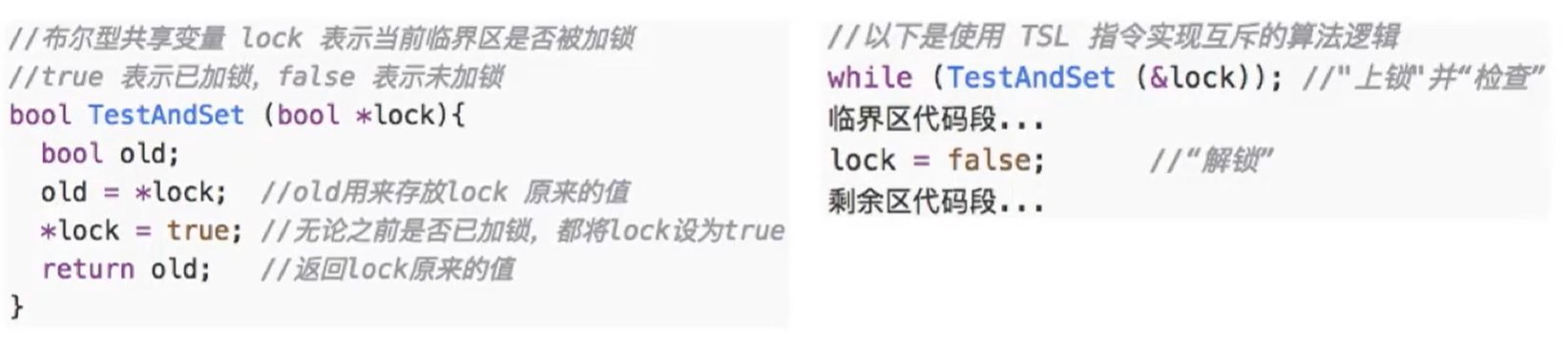
锁
互斥锁(mutex lock)
一个进程在进入临界区时获得锁,在退出临界区时释放锁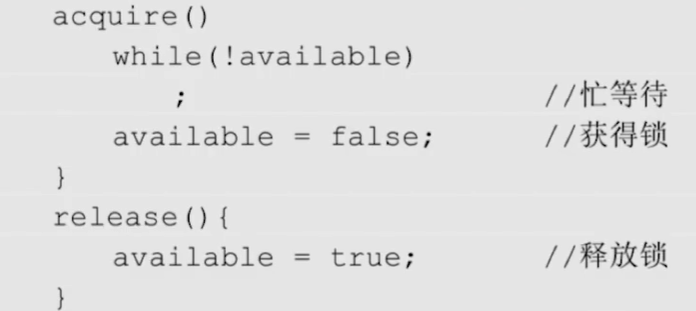
函数acquire()获得锁,函数release()释放锁
每个互斥锁有一个布尔变量available,表示锁是否可用
需要连续循环忙等的互斥锁,都可称为自旋锁(spin lock),如TSL指令、swap指令、单标志法